

德高潔海生物清洗智能機器人的組成結構介紹
時間:2014-11-14 15:33:25作者:LeeZhou來源:德高潔清潔設備
德高潔海生物清洗智能機器人能夠使船舶在不靠碼頭和不進船塢的情況下清除船舶水下結皮,對船舶水線以下部位所附著的海生物實施清除,從而提高船舶航速,降低燃料消耗,進而提高船舶在航率,節省維修經費。之前我們介紹了《高效船體海生物清洗設備—德高潔海生物清洗智能機器人》,下面主要介紹德高潔海生物清洗智能機器人的組成結構。
德高潔海生物清洗智能機器人的組成結構介紹:

德高潔海生物清洗智能機器人是一種半自動化、操作簡易的設備,整個清洗設備由水上和水下兩個部分組成。水下清洗機構包括清洗機構、高頻震蕩系統、磁路機構、可視機構等主要部件。水下清洗機構的外形尺寸約為1500×1000×800mm,回轉機構和清洗機構中馬達的轉動速度可調,清洗茂盛海生物的能力為80~120㎡/h。
1、清洗機構

清洗機構的清洗頭上裝有1個能識別金屬的傳感器,使清洗頭的最下端始終與船體鋼板保持一定的距離。當清洗機構行走到船體表面焊縫時,T 型磁鐵機構中的部分T型磁鐵被頂起,但大多數還牢牢吸附在船體上不至于傾覆。當清洗機構需要轉彎時,通過水上液壓供能系統控制裝在水下前2個磁輪上2個液壓馬達的轉速,就可以輕松實現方向的改變,方便清洗。
2、磁路機構
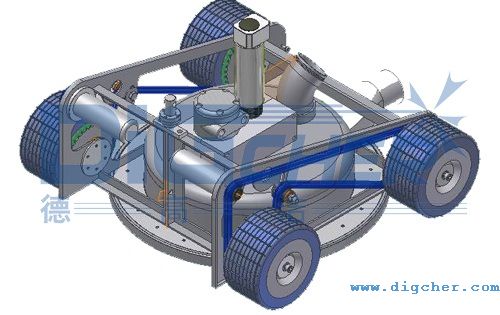
磁路機構由2排T型強磁鐵、1個磁性小萬向輪和4個磁輪構成。驅動4個磁輪的是2個液壓馬達,裝在前面2個磁輪上,由流量閥調節其轉速,馬達轉速的不同可以實現機構的前行和轉向。由于液壓馬達所需扭矩不是太大,因此我們采用了金屬粉末成型的液壓元件,故重量大大減輕。另外,設備如果要平穩可靠地完成作業任務,保證磁塊和船體表面處于良好的吸附狀態是至關重要的。為了增強其抗傾能力,我們從簡便實用的角度考慮,采用在設備的后部安裝1個磁性小萬向輪。利用杠桿作用原理,通過彈簧的作用,船體壁面對杠桿(機體)的后部產生支承力,使機體的前端始終受到指向船體表面的壓力。在設備的總重量、總體積、各部分尺寸已知的情況下,通過對清洗機構在船舶水下表面的受力情況分析,可計算所需磁力的大小。在其它條件都不變的情況下,通過在設備的后部安裝1個小萬向輪,經過比較計算,可以得到使清洗機構不發生傾覆的磁力大小,從而達到抗傾的目的。
3、可視機構
可視機構由水上控制系統提供12V穩壓電源為攝像頭供電,220V供探照燈用,架設在機體的最高處,使提供給視頻系統的視角范圍更廣。
實踐證明,德高潔海生物清洗智能機器人能大幅降低船舶進塢修理時間,提高船舶運行效能,減少燃料成本,對船舶節能將發揮一定作用,其樣機已經試制完成,在實驗室能完成要求的各種動作。
德高潔海生物清洗智能機器人的組成結構介紹:
德高潔海生物清洗智能機器人是一種半自動化、操作簡易的設備,整個清洗設備由水上和水下兩個部分組成。水下清洗機構包括清洗機構、高頻震蕩系統、磁路機構、可視機構等主要部件。水下清洗機構的外形尺寸約為1500×1000×800mm,回轉機構和清洗機構中馬達的轉動速度可調,清洗茂盛海生物的能力為80~120㎡/h。
1、清洗機構
清洗機構的清洗頭上裝有1個能識別金屬的傳感器,使清洗頭的最下端始終與船體鋼板保持一定的距離。當清洗機構行走到船體表面焊縫時,T 型磁鐵機構中的部分T型磁鐵被頂起,但大多數還牢牢吸附在船體上不至于傾覆。當清洗機構需要轉彎時,通過水上液壓供能系統控制裝在水下前2個磁輪上2個液壓馬達的轉速,就可以輕松實現方向的改變,方便清洗。
2、磁路機構
磁路機構由2排T型強磁鐵、1個磁性小萬向輪和4個磁輪構成。驅動4個磁輪的是2個液壓馬達,裝在前面2個磁輪上,由流量閥調節其轉速,馬達轉速的不同可以實現機構的前行和轉向。由于液壓馬達所需扭矩不是太大,因此我們采用了金屬粉末成型的液壓元件,故重量大大減輕。另外,設備如果要平穩可靠地完成作業任務,保證磁塊和船體表面處于良好的吸附狀態是至關重要的。為了增強其抗傾能力,我們從簡便實用的角度考慮,采用在設備的后部安裝1個磁性小萬向輪。利用杠桿作用原理,通過彈簧的作用,船體壁面對杠桿(機體)的后部產生支承力,使機體的前端始終受到指向船體表面的壓力。在設備的總重量、總體積、各部分尺寸已知的情況下,通過對清洗機構在船舶水下表面的受力情況分析,可計算所需磁力的大小。在其它條件都不變的情況下,通過在設備的后部安裝1個小萬向輪,經過比較計算,可以得到使清洗機構不發生傾覆的磁力大小,從而達到抗傾的目的。
3、可視機構
可視機構由水上控制系統提供12V穩壓電源為攝像頭供電,220V供探照燈用,架設在機體的最高處,使提供給視頻系統的視角范圍更廣。
實踐證明,德高潔海生物清洗智能機器人能大幅降低船舶進塢修理時間,提高船舶運行效能,減少燃料成本,對船舶節能將發揮一定作用,其樣機已經試制完成,在實驗室能完成要求的各種動作。
熱門搜索:
